Balancing Robot
Balancing Robot
✅ Purpose
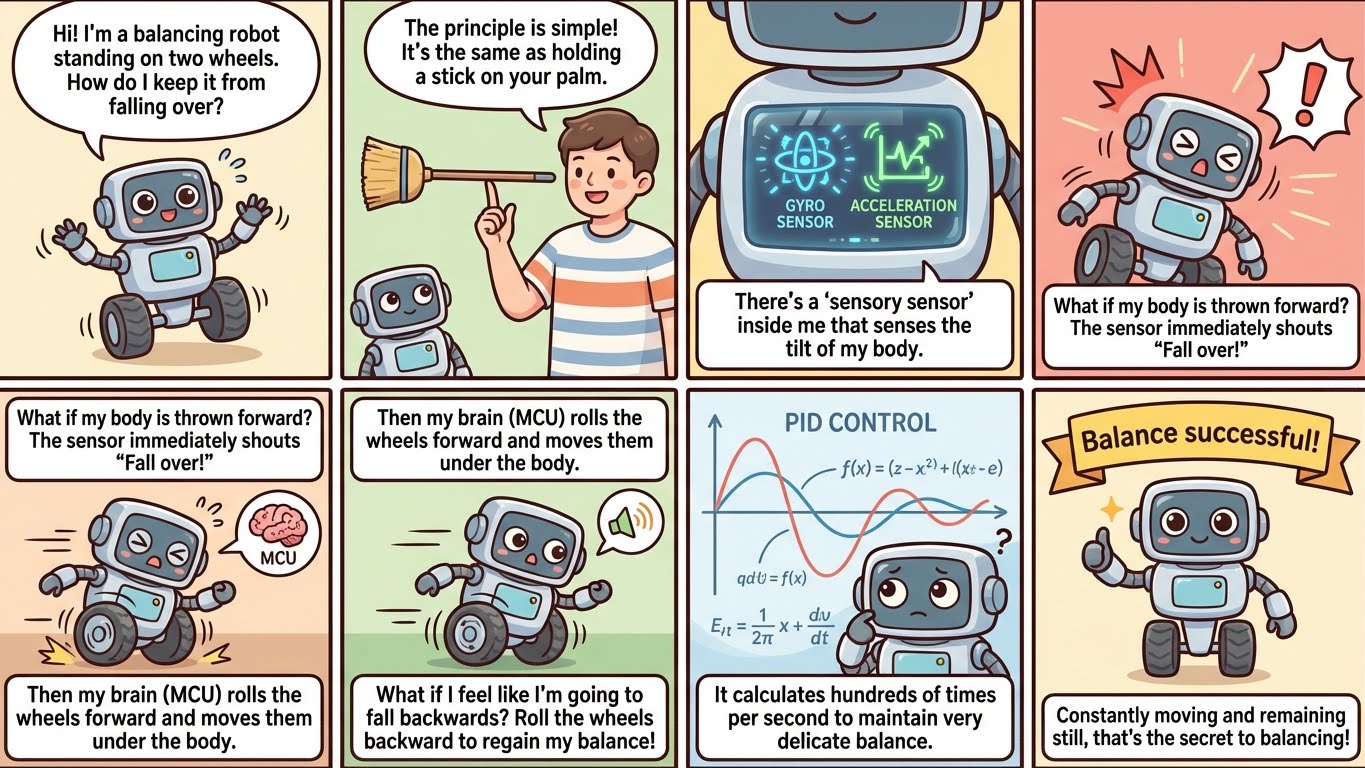
This is a simple example of querying the status of a balancing robot. I used AI to create a cartoon-like image that briefly explains the balancing robot.
The Bluetooth part of Arduino and communication with PC was helped by Vibe coding.
✅ Arduino Source - MPU6050 Sensors
This is the communication part that uses reinforcement learning to control a balancing robot. Of course, the result was a failure. The main reason was latency, but it was still a pretty good result.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
#include <MPU6050.h>
#include <SoftwareSerial.h>
#include<Wire.h>
#define BT_RXD 4
#define BT_TXD 3
SoftwareSerial hc06(BT_TXD, BT_RXD);
const int MPU_addr=0x68; // I2C address of the MPU-6050
int16_t AcX,AcY,AcZ,Tmp,GyX,GyY,GyZ;
void setup(){
Wire.begin();
Wire.beginTransmission(MPU_addr);
Wire.write(0x6B); // PWR_MGMT_1 register
Wire.write(0); // set to zero (wakes up the MPU-6050)
Wire.endTransmission(true);
Serial.begin(9600);
hc06.begin(9600);
}
void loop(){
Wire.beginTransmission(MPU_addr);
Wire.write(0x3B); // starting with register 0x3B (ACCEL_XOUT_H)
Wire.endTransmission(false);
Wire.requestFrom(MPU_addr,14,true); // request a total of 14 registers
AcX=Wire.read()<<8|Wire.read(); // 0x3B (ACCEL_XOUT_H) & 0x3C (ACCEL_XOUT_L)
AcY=Wire.read()<<8|Wire.read(); // 0x3D (ACCEL_YOUT_H) & 0x3E (ACCEL_YOUT_L)
AcZ=Wire.read()<<8|Wire.read(); // 0x3F (ACCEL_ZOUT_H) & 0x40 (ACCEL_ZOUT_L)
Tmp=Wire.read()<<8|Wire.read(); // 0x41 (TEMP_OUT_H) & 0x42 (TEMP_OUT_L)
GyX=Wire.read()<<8|Wire.read(); // 0x43 (GYRO_XOUT_H) & 0x44 (GYRO_XOUT_L)
GyY=Wire.read()<<8|Wire.read(); // 0x45 (GYRO_YOUT_H) & 0x46 (GYRO_YOUT_L)
GyZ=Wire.read()<<8|Wire.read(); // 0x47 (GYRO_ZOUT_H) & 0x48 (GYRO_ZOUT_L)
if (hc06.available()) {
hc06.print(">");
hc06.print(AcX);
hc06.print(",");
hc06.print(AcZ);
hc06.print(",");
hc06.print(GyX);
hc06.print(",");
hc06.print(GyY);
hc06.print(",");
hc06.print(GyZ);
hc06.print("<");
hc06.flush();
}
delay(333);
}
✅Python Receiver, GUI
I asked the AI to give me Python code with a simple UI, and it came out like this:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
import tkinter as tk
from tkinter import ttk
import bluetooth
import threading
class BluetoothGUI:
def __init__(self, root):
self.root = root
self.root.title("Bluetooth Sensor Monitor")
# Simple Label Creation
self.labels = []
for i in range(5):
label = ttk.Label(root, text=f"Sensor {i+1}: ---", font=("Arial", 14))
label.pack(pady=5)
self.labels.append(label)
# Bluetooth Thread
self.running = True
self.thread = threading.Thread(target=self.bluetooth_connect, daemon=True)
self.thread.start()
def update_labels(self, values):
for i in range(min(5, len(values))):
self.labels[i].config(text=f"Sensor {i+1}: {values[i]}")
def parse_packet(self, packet):
try:
values = list(map(int, packet.strip().split(',')))
self.root.after(0, self.update_labels, values)
except ValueError:
pass # First Packet or Abnormal Packet
def bluetooth_connect(self):
server_mac = "98:D3:61:F9:44:A1"
port = 1
server_sock = bluetooth.BluetoothSocket()
server_sock.connect((server_mac, port))
buffer = ''
receiving = False
try:
while self.running:
data = server_sock.recv(50).decode(errors='ignore')
for char in data:
if char == '>': # STX
buffer = ''
receiving = True
elif char == '<': # ETX
receiving = False
self.parse_packet(buffer)
elif receiving:
buffer += char
except OSError:
print("Bluetooth connection closed.")
finally:
server_sock.close()
# GUI Run
root = tk.Tk()
app = BluetoothGUI(root)
root.mainloop()
🎞️ Short Promotional Clip
This is a video clip of the balancing robot I bought made with Veo.

This post is licensed under CC BY 4.0 by the author.